Zaid Daba'een
A young driven software engineer who architects your systems using the latest technologies and untangles your messy problems, faster than anyone else.
A young driven software engineer who architects your systems using the latest technologies and untangles your messy problems, faster than anyone else.
Our SkyWalker X-8 configuration is as follows: Motor Turnigy Aerodrive SK3 - 4240-740kv Brushless Outrunner Motor Kv(rpm/v) 740 Weight (g) 195 Max Current(A) 50 Resistance(mh) 13 Max Voltage(V) 19 Power(W) 870 Shaft A (mm) 5 Length... Read More
As I needed to test if the Odroid's heatsink's temperature can melt the ABS plastic, I ran a CPU stress test and measured the maximum temperature that the Odroid CPU processor can reach. None of the commands need any dependencies or new installations that are... Read More
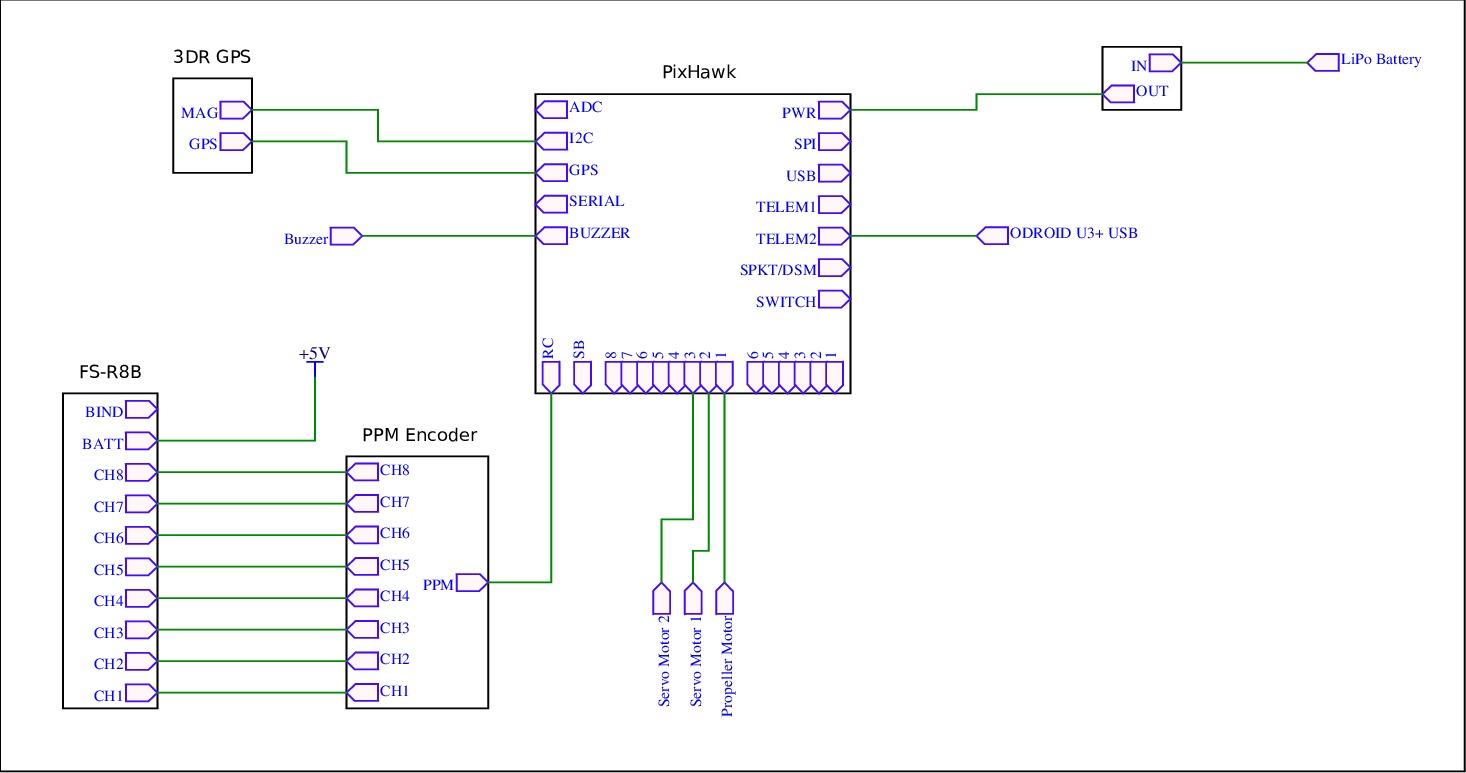
If you were not sure how to connect your Pixhawk, here is a schematic of my connections.... Read More
Overview MAVProxy can be used to control autopilots by using mavlink commands. As a first step into allowing an Android phone to control the autopilot using the famous applications such as 3DR's Tower wirelessly without the need for any new hardware, I allowed... Read More
Physical Connections The Odroid can be connected to the Pixhawk using a FTDI/USB cable. The FTDI/USB cable can be soldered as proposed here: The jumper should go into the TELEM2 port on the pixhawk. My Odroid seems to be unable to giv... Read More

Today the rover successfully followed the mission as set by APM Mission Planner. The rover missions is not a closed loop. It will follow the checkpoints and end at the last checkpoint rather than Home. Video showing waypoints 4 and 5.... Read More